1 State Key Laboratory of Vegetation and Environmental Change, Institute of Botany, Chinese Academy of Sciences, Beijing 1000932 University of the Chinese Academy of Sciences, Beijing 100049
通讯作者: * 通讯作者 Author for correspondence. E-mail: qguo@ibcas.ac.cn* 通讯作者 Author for correspondence. E-mail: qguo@ibcas.ac.cn
During the past decade, unmanned aerial vehicle (UAV) based remote sensing has been increasingly used in the fields of vegetation inventory, natural resource management, and biodiversity conservation, due to its low cost and high flexibility. In this study, we present a reference for the selection of UAV platforms and remote sensing sensors, by introducing a UAV classification system and summarizing applicability in biodiversity monitoring using remote sensing techniques. For each UAV platform category, we also introduce the characteristics and capabilities of different remote sensing sensors that can be supported. Moreover, through the combination of a case study which collected high-fidelity UAV-based remotely sensed data, we discuss current research progress using UAV-borne remote sensing data to derive direct and indirect biodiversity parameters. Finally, we discuss the current limitations of UAV-based remote sensing platforms for biodiversity monitoring, such as the existing gap between hardware and software, the high cost of certain components (e.g. the initial measurement unit), incomplete laws and regulations, and the disconnect with traditional biodiversity monitoring methods. In summary, we believe that UAV-based remote sensing platforms can greatly help to fill the gaps between terrestrial measurements and aerial/spaceborne measurements, and can increase the accuracy and reliability of upscaling point-based terrestrial measurements to the regional scale. There is a need to launch more projects that address building a UAV-based biodiversity monitoring network, and therefore improve our capability to analyze and forecast biodiversity changes in hotspots.
表1 不同尺寸无人机参数对比(参考《民用无人驾驶航空器系统驾驶员管理暂行规定》; Anderson & Gaston, 2013)
Table 1 Comparison the characterization of different UAV sizes (refer to the Interim Provisions on the Administration of Civil Unmanned Aircraft System Pilot; Anderson & Gaston, 2013)
Table 2 Comparison of fixed- and rotating-wing UAV
固定翼 Fixed-wing
多旋翼 Rotating-wing
优势 Advantage
飞行速度快、航程远、航时长、载荷大、空中最大飞行高度更高 Faster in flying speed, longer in flying time and distance, larger in payload, and higher in max flying height
起飞环境要求低, 不受场地限制; 能悬停, 可长时间观测某个静止目标; 操作简单、维护方便 Less requirements in takeoff and landing place, hover in place and observe, and easy to operate and maintain.
局限性 Limitation
操作相对困难, 受场地限制较多 More difficult in operation, and more requirements in takeoff and landing place
载荷小、续航时间短 Lower in payload and shorter in flying time
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数。 High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
ZhaoCH, YangWB, LiB, YangG (2014) Composite aircraft with fixed wing and four-rotor-wing combined. In: Proceedings of the Fifth China Unmanned Aerial Vehicle (UAV) Conference (eds Chinese Aeronautical Society), pp. 39-44. China Aviation Publishing Media Co., Ltd, Beijing. (in Chinese)
Feasibility study of using non-calibrated UAV-based RGB imagery for grassland monitoring: case study at the Rengen Long-term Grassland Experiment (RGE), Germany.
Mapping crop water stress index in a ‘Pinot-noir’ vineyard: comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle.
MerinoL, CaballeroF, MartinezR, MazaI, OlleroA (2010) Automatic forest fire monitoring and measurement using unmanned aerial vehicles. In: VI International Conference on Forest Fire Research (ed. Viegas DX), pp. 1-15.
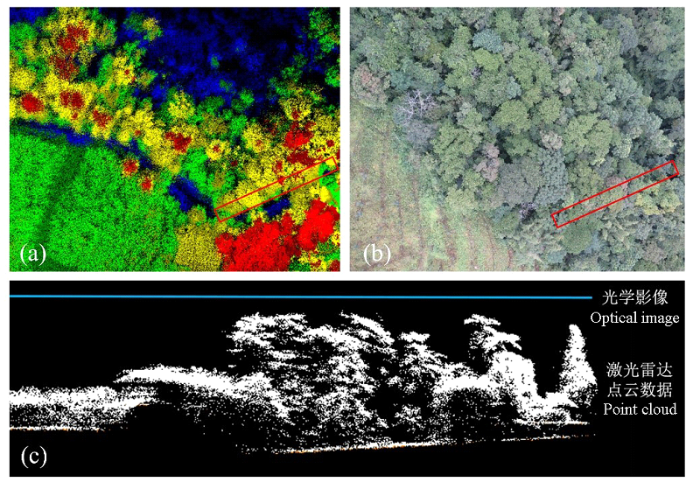
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
地形对典型阔叶红松林灌木更新的影响. 生物多样性,
1
2015
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
Lightweight unmanned aerial vehicles will revolutionize spatial ecology.
4
2013
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
... 不同尺寸无人机参数对比(参考《民用无人驾驶航空器系统驾驶员管理暂行规定》; Anderson & Gaston, 2013) ...
... Comparison the characterization of different UAV sizes (refer to the Interim Provisions on the Administration of Civil Unmanned Aircraft System Pilot; Anderson & Gaston, 2013) ...
... (3)多源数据融合.数据融合是指同一区域不同遥感数据或遥感数据与非遥感数据之间的匹配融合, 包括不同传感器的遥感数据融合和不同时相的遥感数据融合.通过多源数据融合能够弥补单一数据源的不足, 实现各种数据源的优势互补.数据融合在生物多样性监测中的应用已相继开展, 如多光谱数据和全色影像融合、SAR (Synthetic Aperture Radar)和光学影像融合, 以及遥感数据与地面通量塔数据结合的升尺度研究(Huang et al, 2009; Souza-Filho et al, 2009; Anderson & Gaston, 2013).通过多源数据融合能够实现空间分辨率、光谱分辨率和时间分辨率的相互补充, 可提高定量反演的精度, 为生物多样性监测提供更系统、科学和有效的 支撑. ...
Feasibility study of using non-calibrated UAV-based RGB imagery for grassland monitoring: case study at the Rengen Long-term Grassland Experiment (RGE), Germany.
2
2015
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
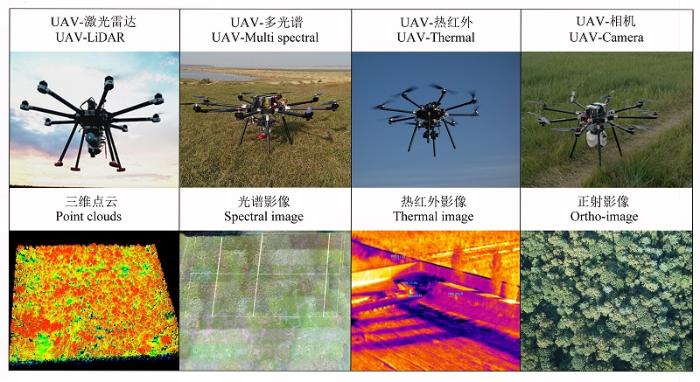
不同无人机遥感平台及其相应遥感数据 ...
... Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Mapping crop water stress index in a ‘Pinot-noir’ vineyard: comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle.
2
2014
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Introducing a low-cost mini-UAV for thermal-and multispectral-imaging. International Archives of the Photogrammetry,
2
2012
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Global biodiversity: indicators of recent declines.
1
2010
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
Unmanned aerial systems for photogrammetry and remote sensing: a review.
Advances in animal ecology from 3D-LiDAR ecosystem mapping.
1
2014
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
UAV based multi-spectral imaging system for environmental monitoring. tm-Technisches Messen Plattform für Methoden,
2
2011
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
无人机遥感在红树林资源调查中的应用
2015
无人机遥感在红树林资源调查中的应用
2015
Predictive vegetation mapping: geographic modelling of biospatial patterns in relation to environmental gradients.
1
1995
... (1)植物物种分布和植被制图.物种分布区鉴定以及植被覆盖类型划分对植被空间分布和对特定环境的适应性研究具有重要意义(Franklin, 1995; 李珍存等, 2006; Kelly et al, 2011; McDowell et al, 2015).Kaneko和Nohara (2014)对比了载人飞机和无人机获取的影像数据在植被制图中的应用, 并探讨了无人机遥感平台在植被资源调查方面的可行性.该研究基于无人机航拍影像清晰地分辨了植物的数量和形状, 精细划分了不同物种的分布范围, 得到高精度的植被分类图.冯家莉等(2015)采用无人机影像数据进行了红树林树种分类的研究, 从而为红树林资源管理和保护提供了数据支撑. ...
Modeling plant species distributions under future climates: how fine scale do climate projections need to be?
1
2013
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
生态系统观测研究网络在地球系统科学中的作用
1
2007
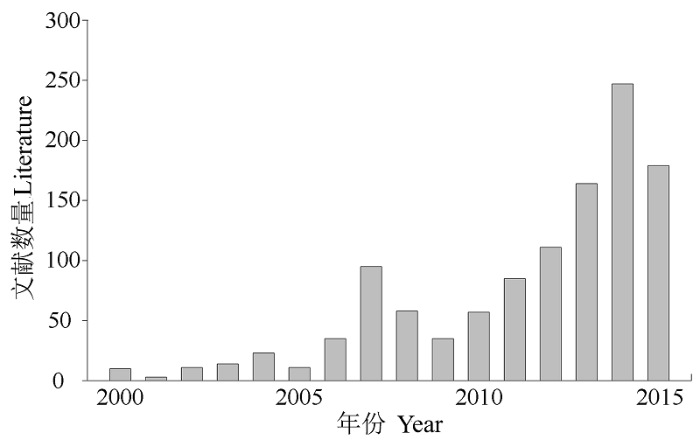
... 通过ISI Web of Science数据库搜索无人机平台在生态环境应用中的文献数量(图1)可以看出, 文献数量总体呈现上升趋势, 研究内容涉及地形建模、物种识别、森林结构参数提取、专题图制作、森林管理等.人们正在逐步认识到无人机遥感技术是应对生物多样性变化复杂、滞后、难以预测等监测技术挑战(傅伯杰等, 2007)的强有力工具.但是, 在工作开展过程中如何根据需求选择合适的载体和传感器以及如何利用这些高精度的遥感信息,仍有待进一步探索.本文从生物多样性遥感监测应用角度首先介绍了无人机分类系统, 以期为具体工作开展过程中如何选择合适的载体和传感器提供参考; 然后总结不同类型无人机的适用性及其可搭载传感器的用途与区别.在此基础上, 针对无人机平台的高精度遥感信息具体应用案例, 就反映生物多样性变化并揭示其驱动机制方面的无人机遥感直接和间接指标的相关研究进展展开阐述.最后, 就目前无人机遥感技术在生物多样性监测领域的应用中存在的限制进行探讨. ...
生态系统观测研究网络在地球系统科学中的作用
1
2007
... 通过ISI Web of Science数据库搜索无人机平台在生态环境应用中的文献数量(图1)可以看出, 文献数量总体呈现上升趋势, 研究内容涉及地形建模、物种识别、森林结构参数提取、专题图制作、森林管理等.人们正在逐步认识到无人机遥感技术是应对生物多样性变化复杂、滞后、难以预测等监测技术挑战(傅伯杰等, 2007)的强有力工具.但是, 在工作开展过程中如何根据需求选择合适的载体和传感器以及如何利用这些高精度的遥感信息,仍有待进一步探索.本文从生物多样性遥感监测应用角度首先介绍了无人机分类系统, 以期为具体工作开展过程中如何选择合适的载体和传感器提供参考; 然后总结不同类型无人机的适用性及其可搭载传感器的用途与区别.在此基础上, 针对无人机平台的高精度遥感信息具体应用案例, 就反映生物多样性变化并揭示其驱动机制方面的无人机遥感直接和间接指标的相关研究进展展开阐述.最后, 就目前无人机遥感技术在生物多样性监测领域的应用中存在的限制进行探讨. ...
Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles.
2012
Use of unmanned aerial systems for multispectral survey and tree classification: a test in a park area of northern Italy.
2014
Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation.
2016
Mapping radiation interception in row-structured orchards using 3D simulation and high-resolution airborne imagery acquired from a UAV.
2
2012
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
生物多样性近地面遥感监测: 应用现状与前景展望
1
2016
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
生物多样性近地面遥感监测: 应用现状与前景展望
1
2016
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
激光雷达在森林生态系统监测模拟中的应用现状与展望,
1
2014
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
激光雷达在森林生态系统监测模拟中的应用现状与展望,
1
2014
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
Identifying species of individual trees using airborne laser scanner.
2004
Estimating the quantity and quality of coarse woody debris in Yellowstone post-fire forest ecosystem from fusion of SAR and optical data.
1
2009
... (3)多源数据融合.数据融合是指同一区域不同遥感数据或遥感数据与非遥感数据之间的匹配融合, 包括不同传感器的遥感数据融合和不同时相的遥感数据融合.通过多源数据融合能够弥补单一数据源的不足, 实现各种数据源的优势互补.数据融合在生物多样性监测中的应用已相继开展, 如多光谱数据和全色影像融合、SAR (Synthetic Aperture Radar)和光学影像融合, 以及遥感数据与地面通量塔数据结合的升尺度研究(Huang et al, 2009; Souza-Filho et al, 2009; Anderson & Gaston, 2013).通过多源数据融合能够实现空间分辨率、光谱分辨率和时间分辨率的相互补充, 可提高定量反演的精度, 为生物多样性监测提供更系统、科学和有效的 支撑. ...
Accuracy comparison of various remote sensing data sources in the retrieval of forest stand attributes.
1
2000
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
A UAV-based roe deer fawn detection system.
2
2011
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
An assessment of small unmanned aerial vehicles for wildlife research.
2
2006
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Assessing biodiversity by remote sensing in mountainous terrain: the potential of LiDAR to predict forest beetle assemblages.
2009
Review of effective vegetation mapping using the UAV (Unmanned Aerial Vehicle) method.
2014
Retriving forest structure variables based on image texture analysis and IKONOS-2 imagery.
1
2006
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
Mapping changes to vegetation pattern in a restoring wetland: finding pattern metrics that are consistent across spatial scale and time.
1
2011
... (1)植物物种分布和植被制图.物种分布区鉴定以及植被覆盖类型划分对植被空间分布和对特定环境的适应性研究具有重要意义(Franklin, 1995; 李珍存等, 2006; Kelly et al, 2011; McDowell et al, 2015).Kaneko和Nohara (2014)对比了载人飞机和无人机获取的影像数据在植被制图中的应用, 并探讨了无人机遥感平台在植被资源调查方面的可行性.该研究基于无人机航拍影像清晰地分辨了植物的数量和形状, 精细划分了不同物种的分布范围, 得到高精度的植被分类图.冯家莉等(2015)采用无人机影像数据进行了红树林树种分类的研究, 从而为红树林资源管理和保护提供了数据支撑. ...
Dawn of drone ecology: low-cost autonomous aerial vehicles for conservation.
1
2012
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
... (1)植物物种分布和植被制图.物种分布区鉴定以及植被覆盖类型划分对植被空间分布和对特定环境的适应性研究具有重要意义(Franklin, 1995; 李珍存等, 2006; Kelly et al, 2011; McDowell et al, 2015).Kaneko和Nohara (2014)对比了载人飞机和无人机获取的影像数据在植被制图中的应用, 并探讨了无人机遥感平台在植被资源调查方面的可行性.该研究基于无人机航拍影像清晰地分辨了植物的数量和形状, 精细划分了不同物种的分布范围, 得到高精度的植被分类图.冯家莉等(2015)采用无人机影像数据进行了红树林树种分类的研究, 从而为红树林资源管理和保护提供了数据支撑. ...
1982-2003年中国西北地区植被动态变化格局分析
1
2006
... (1)植物物种分布和植被制图.物种分布区鉴定以及植被覆盖类型划分对植被空间分布和对特定环境的适应性研究具有重要意义(Franklin, 1995; 李珍存等, 2006; Kelly et al, 2011; McDowell et al, 2015).Kaneko和Nohara (2014)对比了载人飞机和无人机获取的影像数据在植被制图中的应用, 并探讨了无人机遥感平台在植被资源调查方面的可行性.该研究基于无人机航拍影像清晰地分辨了植物的数量和形状, 精细划分了不同物种的分布范围, 得到高精度的植被分类图.冯家莉等(2015)采用无人机影像数据进行了红树林树种分类的研究, 从而为红树林资源管理和保护提供了数据支撑. ...
A bottom-up approach to segment individual deciduous trees using leaf-off lidar point cloud data.
1
2014
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
试论生物多样性的概念
1
1993
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
试论生物多样性的概念
1
1993
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
中国生物多样性监测网络建设: 从CForBio到Sino BON
1
2015
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
中国生物多样性监测网络建设: 从CForBio到Sino BON
1
2015
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
Using Unmanned Aerial Vehicles (UAV) for high-resolution reconstruction of topography: the structure from motion approach on coastal environments.
2
2013
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Global satellite monitoring of climate-induced vegetation disturbances.
1
2015
... (1)植物物种分布和植被制图.物种分布区鉴定以及植被覆盖类型划分对植被空间分布和对特定环境的适应性研究具有重要意义(Franklin, 1995; 李珍存等, 2006; Kelly et al, 2011; McDowell et al, 2015).Kaneko和Nohara (2014)对比了载人飞机和无人机获取的影像数据在植被制图中的应用, 并探讨了无人机遥感平台在植被资源调查方面的可行性.该研究基于无人机航拍影像清晰地分辨了植物的数量和形状, 精细划分了不同物种的分布范围, 得到高精度的植被分类图.冯家莉等(2015)采用无人机影像数据进行了红树林树种分类的研究, 从而为红树林资源管理和保护提供了数据支撑. ...
2
2010
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Using UAV-based photogra- mmetry and hyperspectral imaging for mapping bark beetle damage at tree-level.
2
2015
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Biodiversity conservation at multiple scales: functional sites, landscapes, and networks.
1
2000
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
Seeing the trees in the forest: using lidar and multispectral data fusion with local filtering and variable window size for estimating tree height.
1
2004
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
The social implications of using drones for biodiversity conservation.
Multi-sensor data fusion for geomorphological and environmental sensitivity index mapping in the Amazonian mangrove coast, Brazil.
1
2009
... (3)多源数据融合.数据融合是指同一区域不同遥感数据或遥感数据与非遥感数据之间的匹配融合, 包括不同传感器的遥感数据融合和不同时相的遥感数据融合.通过多源数据融合能够弥补单一数据源的不足, 实现各种数据源的优势互补.数据融合在生物多样性监测中的应用已相继开展, 如多光谱数据和全色影像融合、SAR (Synthetic Aperture Radar)和光学影像融合, 以及遥感数据与地面通量塔数据结合的升尺度研究(Huang et al, 2009; Souza-Filho et al, 2009; Anderson & Gaston, 2013).通过多源数据融合能够实现空间分辨率、光谱分辨率和时间分辨率的相互补充, 可提高定量反演的精度, 为生物多样性监测提供更系统、科学和有效的 支撑. ...
Overcoming the challenges to conservation monitoring: integrating data from in-situ reporting and global data sets to measure impact and performance.
1
2015
... 全球生态学界、生物多样性保护相关组织、各国政府部门一直在积极探索监测生物多样性变化的有效途径和方法, 从而确认区域或更大尺度上生物多样性现状格局, 预估其未来演化的可能趋势, 以期为解决全球变化背景下的生物多样性丧失问题提供科学数据支撑(马克平, 1993; Poiani et al, 2000; Butchart et al, 2010; Stephenson et al, 2015).随着对地观测体系的不断发展和完善, 近地面遥感技术的出现为生物多样性监测带来了新的机遇, 它能够为生物多样性监测提供相对较大范围、长时间序列、高时空分辨率的光谱、影像和激光雷达数据, 被认为是生物多样性遥感监测的重要手段(马克平, 2015; 郭庆华等, 2016).尤其是无人机(unmanned aerial vehicle, UAV)遥感技术, 由于其机动灵活、成本相对载人飞机平台低廉等优势, 近10年在植被生态调查、资源环境监测、生物多样性保护等科研领域的应用日渐兴起(张园等, 2011; Koh & Wich, 2012; Anderson & Gaston, 2013).而且, 它最有可能让遥感技术走出无法提供大尺度精细数据的困境. ...
Can LiDAR data improve bird habitat suitability models?
1
2012
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
a) Assessing the feasibility of UAV-based LiDAR for high resolution forest change detection. International Archives of the Photogrammetry,
2
2012
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... ), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Monitoring the invasion of Spartina alterniflora using very high resolution unmanned aerial vehicle imagery in Beihai, Guangxi (China).
2014
Unmanned aircraft systems in remote sensing and scientific research: classification and considerations of use.
2012
The relative contribution of terrain, land cover, and vegetation structure indices to species distribution models.
1
2013
... (4)生境监测.生境信息可间接反映生物多样性因素, 植被结构参数在评价生物物种栖息地和预测物种分布中起着重要的作用, 特别是下层植被对物种的分布具有较大影响(Hyyppä et al, 2000; Kayitakire et al, 2006); 地形信息对环境内动植物、物种分布也有重要影响(Wilson et al, 2013; Franklin et al, 2013; 郭庆华等, 2014; 赵雪等, 2015).激光雷达扫描仪能够穿透林冠, 获取涵盖林冠和林下的垂直三维信息, 并广泛应用于森林参数反演(Popescu & Wynne, 2004; Lu et al, 2014).与机载平台相比, 无人机操作灵活, 飞行高度低, 能获取更高的点云密度且不受云层影响, 无人机激光雷达在森林垂直结构, 尤其是林下植被结构监测较机载平台更有优势.亚热带生物群落演替速度快, 生物多样性极高, 是众多动植物物种的栖息地, 通过对点云数据进行处理, 对森林进行分层结构和垂直结构的分析, 实现生境三维结构和质量的定量描述, 并结合地面调查数据评估生境内鸟类的多样性(Tattoni et al, 2012; Davies & Asner, 2014). ...
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
集成高分辨率 UAV 影像与激光雷达点云的亚热带森林林分特征反演
2
2015
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
... Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
不同无人机遥感平台及其相应遥感数据 ...
Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV).
1
2013
... Advantages and limitation of different sensors and the application
传感器 Sensor
原始数据 Raw data
应用案例 Application
优势 Advantage
局限性 Limitation
高分相机 High-resolution camera
二维图像, 包含颜色信息 2D image, RGB bands
草地监测(Bareth et al, 2015)、林火监测(Merino et al, 2012)、野生动物研究(Jones et al, 2006)、地形产品生成(Mancini et al, 2013) Grassland monitoring (Bareth et al, 2015), wildfire detection (Merino et al, 2012), wildlife research (Jones et al, 2006), and terrain products generation (Mancini et al, 2013)
价格便宜、数据处理技术相对成熟 Cheap in hardware and mature in data post-processing
成像质量受天气条件影响; 光谱信息有限 The imaging quality is affected by the weather condition, and limited in spectral information
多光谱成像仪 Multi spectrum sensor
二维图像, 包含几个离散波段的光谱信息 2D image, several spectral bands
冠层截获的光合有效辐射研究(Guillen-Climent et al, 2012); 精准农业(De Biasio et al, 2011) Photosynthetically available radiation interception in canopy (Guillen-Climent et al, 2012). Precision agriculture (De Biasio et al, 2011)
能够获取光谱信息, 反演常用植被指数 Easy to retrieval vegetation index
同物异谱、同谱异物现象造成数据解译困难 Difficult in classification due to synonyms spectrum phenomenon and same spectrum different object phenomenon
病虫害监测(Näsi et al, 2015) 冠层生化参数反演(Zarco-Tejada et al, 2013) Pest monitoring (Näsi et al, 2015) Deriving canopy biochemical parameter
光谱分辨率高, 有利于精确反演各种生化参数 Higher in spectral resolution, easier to the precise derive biochemical parameters
数据量大, 数据处理分析难度大 Large in data size and difficult in data processes and analysis
热红外 相机 Thermal infrared sensor
二维图像, 包含温度信息 2D image, contains temperature information
干旱胁迫响应研究(Bendig et al, 2012)、冠层水分胁迫研究(Bellvert et al, 2013)、动物监测(Israel , 2011) Plant response to drought (Bendig et al, 2012), water deficiency in canopy (Bellvert et al, 2013), and animal monitoring (Israel, 2011)
能够获取温度信息, 可以识别部分动物 Obtain temperature information and detect some animals
温度变化易受周围环境影响 Affected by the environment temperature
激光雷达 扫描仪 LiDAR sensor
点云数据, 包含三维地理坐标 Point cloud, with 3D geographic coordinates
森林参数提取(许子乾等, 2015)、变化监测(Wallace et al, 2012a) Forest parameters extraction (Xu et al, 2015), and change detection (Wallace et al, 2012a)
高精度, 受外界环境因素影响小; 可反演植被三维形态结构参数. High precision, rarely influenced by the external environment; able to retrieve three dimensional shape and structure parameters of vegetation
无法获取纹理、光谱信息 Unable to obtain texture and spectral information
 , 吴芳芳
, 吴芳芳

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}