
|
|
||
|
路径依赖的选择——统一自然选择与中性选择
生物多样性
2024, 32 (7):
24120-.
DOI: 10.17520/biods.2024120
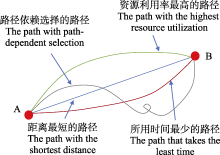
进化思想和方法论并行的、相互独立的自然选择理论和中性选择理论是否能够有效统一起来, 一直是理论生物学重点关注的问题, 而路径依赖的选择提供了一种可能。与中性选择理论一致, 路径依赖的选择也采用了完全对称性的前提假设——自然界的突变完全是基于统计随机性, 不具备方向性, 因而突变没有适合度的差异。但是在一些特定的时空环境下, 环境的正反馈效应导致中性选择对称性的破缺, 促使该突变产生递归效应——拉马克的主动选择或者获得性遗传效应, 这种适宜环境正反馈作用下的生物主动选择与环境自然选择压力下的被动选择产生相互拮抗作用, 并因此在多维的空间条件下形成路径。路径依赖的选择认为生物演化的过程将是一个路径频率的选择过程而不是适合度提高的过程, 并强烈依赖于其历史上所经历的事件或者环境变化等外界条件; 由于不同演化路径之间存在转移概率(比如生物演化中的质粒转移、转座子、生态过程相互作用等), 路径的演化会存在加速或者减速效应, 解释了古尔德等主张的间断平衡论。当环境选择压力很小或者为零的时候, 多数或者所有路径都等价(类似中性选择结果); 而随着环境压力的增大, 不同路径的频率将差异化, 且路径频率比较高的更容易被选择。当环境压力很大, 历史事件等外界因素或者演化过程对路径本身的演化没有影响的时候(静态的、均衡状态), 频率最高的那条路径就是演化所用时间最短或者最优的路径——达尔文自然选择理论的结果。在借鉴了现代物理学, 尤其是量子力学所用的路径积分方法, 路径依赖的选择也许为我们提供了一个不同的视角和方法来解释生物的演化过程。 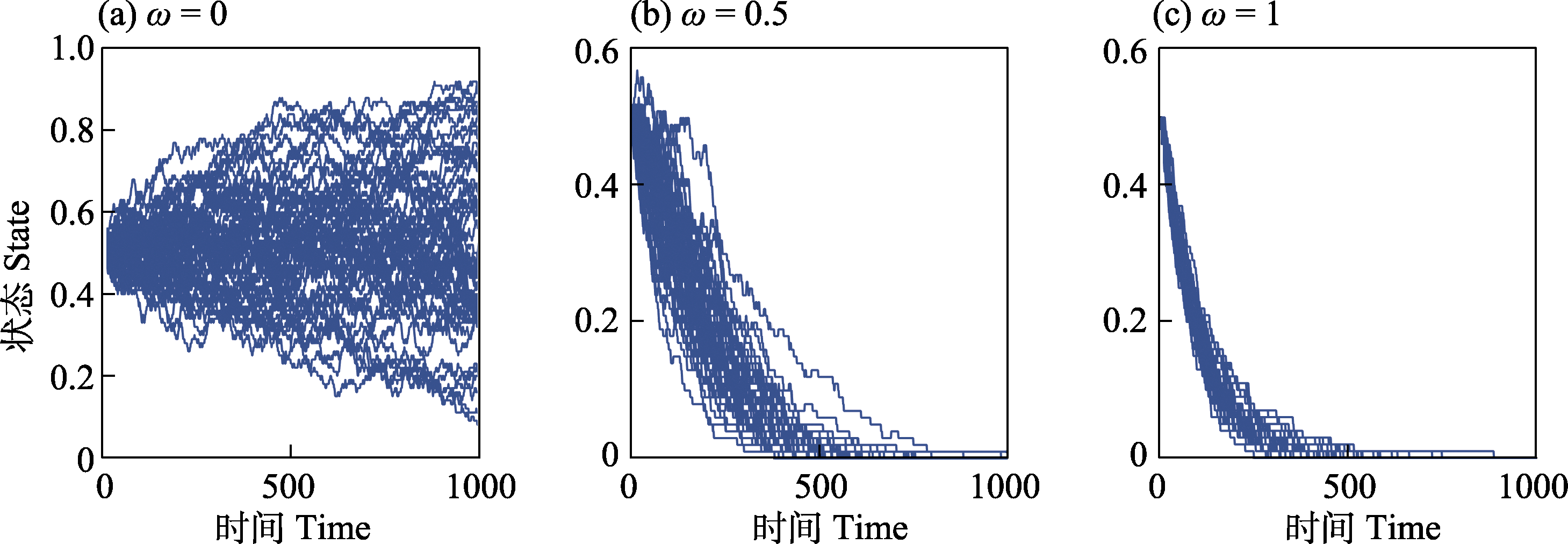 View image in article
图2
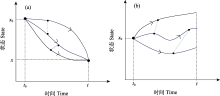
不同选择压力下的路径演化图(改编自Wang et al,
正文中引用本图/表的段落
根据路径积分理论, 基因型A的频率从起点x0到终点x的演化路径有无数多条, 不同选择强度对演化路径的影响可能为在自然选择和中性选择之间建立起一座理论桥梁提供了一种途径。基于Moran过程的模拟结果表明, 当选择是中性时, 终点x可以是区间[0,1]中的任意一点, 演化过程不具有方向性, 且路径的分布很分散, 而随着选择强度ω的增大, 终点x的分布是具有方向性的, 且路径的分布会越来越集中(图2)。
路径依赖的自然选择中, 生态位或者资源共享完全相同的情况下, 不同的物种或者表型特征就可能完全共存。同域环境下, 不同的突变可能在不同的历史环境下而形成不同的路径并沿着惯性而演化下去, 即使又生活在完全相同的环境下, 双方仍然可以共存下去。只有在选择压力很大时, 多数个体会选择路径频率更高的那条路径而演化, 这条路径频率最高的路径可能也是达尔文自然选择理论所认为的最优的那条路径(图2)。
但是, 随着选择压力的增大, 提高效率的动力越强, 某条走得最多的小路可能就是行程最短的路, 也就是最优的那条路。但是, 自然选择也可能选择收益或者适合度不是最高的, 而是一条行人频率较高的路径, 因此路径选择是一个路径频率的选择过程。在静态的环境条件下或者路径的目标地固定而静止在某个特定位置的时候, 虽然所有路径都存在被选择的可能性, 但随着演化压力的增大, 最优的路径选择频率将会提高, 甚至多数个体都会选择这一条路径。当我们定义这条路径就是时间最短或者适合度提高最快的那条路径, 就完全回到了达尔文的自然选择理论中。选择最优的那条路是完全确定性的结果(图2)。
但是, 随着选择压力的增大, 提高效率的动力越强, 某条走得最多的小路可能就是行程最短的路, 也就是最优的那条路.但是, 自然选择也可能选择收益或者适合度不是最高的, 而是一条行人频率较高的路径, 因此路径选择是一个路径频率的选择过程.在静态的环境条件下或者路径的目标地固定而静止在某个特定位置的时候, 虽然所有路径都存在被选择的可能性, 但随着演化压力的增大, 最优的路径选择频率将会提高, 甚至多数个体都会选择这一条路径.当我们定义这条路径就是时间最短或者适合度提高最快的那条路径, 就完全回到了达尔文的自然选择理论中.选择最优的那条路是完全确定性的结果(
但是, 随着选择压力的增大, 提高效率的动力越强, 某条走得最多的小路可能就是行程最短的路, 也就是最优的那条路.但是, 自然选择也可能选择收益或者适合度不是最高的, 而是一条行人频率较高的路径, 因此路径选择是一个路径频率的选择过程.在静态的环境条件下或者路径的目标地固定而静止在某个特定位置的时候, 虽然所有路径都存在被选择的可能性, 但随着演化压力的增大, 最优的路径选择频率将会提高, 甚至多数个体都会选择这一条路径.当我们定义这条路径就是时间最短或者适合度提高最快的那条路径, 就完全回到了达尔文的自然选择理论中.选择最优的那条路是完全确定性的结果(
本文的其它图/表
|
{kind=link}