
生物多样性 ›› 2018, Vol. 26 ›› Issue (8): 892-904. DOI: 10.17520/biods.2018039 cstr: 32101.14.biods.2018039
邓云1,3,4,*( ), 王彬2, 李强2, 张志明2, 邓晓保1,3, 曹敏1, 林露湘1,3
), 王彬2, 李强2, 张志明2, 邓晓保1,3, 曹敏1, 林露湘1,3
收稿日期:2018-02-06
接受日期:2018-08-05
出版日期:2018-08-20
发布日期:2018-09-27
通讯作者:
邓云
基金资助:
Deng Yun1,3,4,*(), Wang Bin2, Li Qiang2, Zhang Zhiming2, Deng Xiaobao1,3, Cao Min1, Lin Luxiang1,3
Received:2018-02-06
Accepted:2018-08-05
Online:2018-08-20
Published:2018-09-27
Contact:
Deng Yun
摘要:
准确的样地坐标位置是无人机航摄数据与地面调查数据融合使用的必要前提, 但是在森林样地的具体实践中, 会有许多因素制约着样地位置的测量精度, 这有可能影响后期的数据融合过程甚至得出错误的结论, 研究者们需要对此予以足够的重视。本文通过对比西双版纳地区10个热带森林样地及周围区域无人机航摄过程中的地面控制点测量精度、Photoscan摄影测量软件所得点云解算精度和照片曝光点重投影精度, 发现: (1)即使使用性能相对较好的实时差分(real time kinematic, RTK)式GNSS系统进行定位, 在林内也很难获得很好的定位精度, 林窗处的地面控制点均方根误差(root mean square error, RMSE)在水平和垂直方向分别为0.167 ± 0.158 m和0.297 ± 0.170 m, 林下样地顶点桩处分别为0.392 ± 0.368 m和0.657 ± 0.412 m; (2)软件的全局解算精度主要受控制点地面测量精度和控制点数量的影响; (3)若仅依托普通的单站式GPS对无人机位置进行定位, 则照片曝光点的重投影坐标位置可能存在较大误差(RMSE在水平和垂直方向上分别为18.434 ± 5.252 m和34.042 ± 6.920 m); (4)估测地形与实测地形间的高差标准差与林冠平均高度正相关(r = 0.713, P < 0.05), 估测地形模型在20 ha样地尺度下的验证结果优于1 ha样地。基于以上结果, 我们建议: (1)在对热带森林进行无人机航摄的过程中, 必须有足够数量和质量的分布相对均匀的地面控制点对测量误差进行控制; (2)摄影测量法的优势在于能够以相对简单的前端设备建立数字表面模型, 但该方法可能很难在森林样地中建立准确的数字地形模型。在使用无人机获取数据之前, 研究者应预先考虑到适合自己的恰当方法以应对以上的精度控制问题。
邓云, 王彬, 李强, 张志明, 邓晓保, 曹敏, 林露湘 (2018) 轻小型无人机航摄技术辅助的热带森林样地测量精度问题探讨. 生物多样性, 26, 892-904. DOI: 10.17520/biods.2018039.
Deng Yun, Wang Bin, Li Qiang, Zhang Zhiming, Deng Xiaobao, Cao Min, Lin Luxiang (2018) An analysis of lightweight-drone-assisted mapping accuracy in tropical forest plot. Biodiversity Science, 26, 892-904. DOI: 10.17520/biods.2018039.
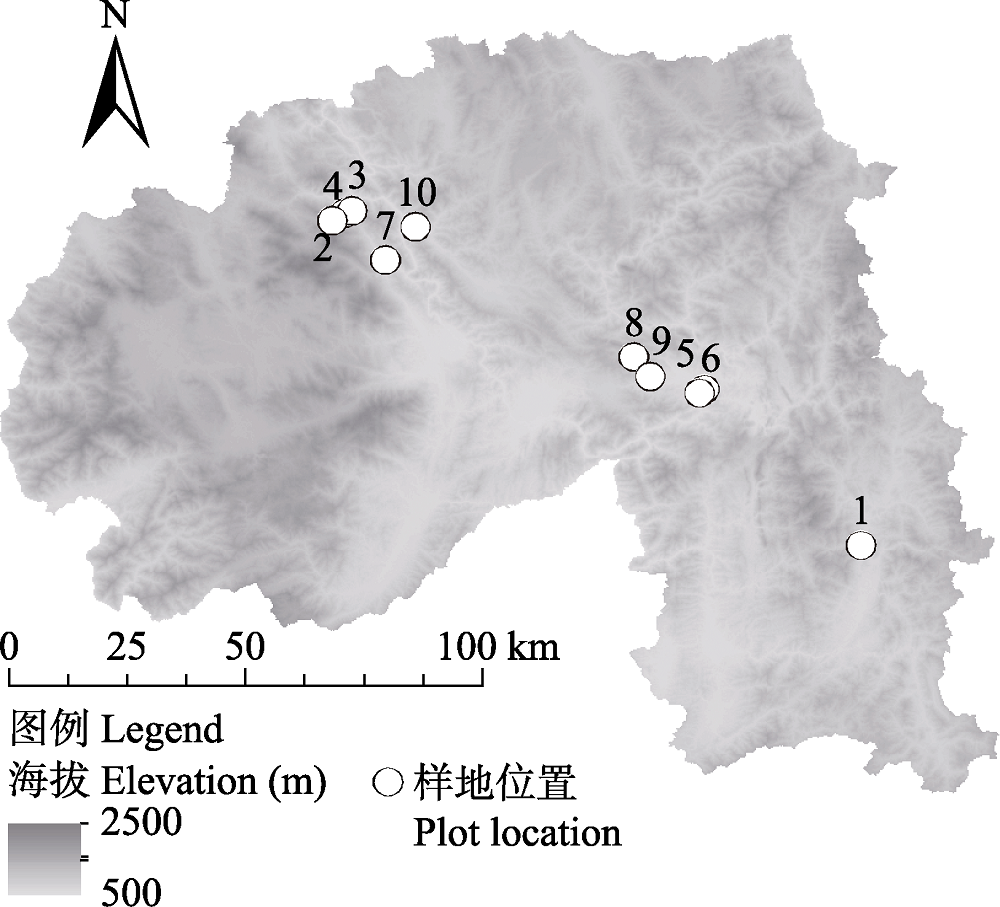
图1 研究样地分布位置。1: 补蚌; 2: 过门山; 3: 茶地头; 4: 大平掌; 5: 石灰山; 6: 新开地; 7: 茶厂后山; 8: 44公里; 9: 勐仑水库; 10: 江边站。
Fig. 1 Distribution of sample plots. 1, Bubeng; 2, Guomenshan; 3, Chaditou; 4, Dapingzhang; 5, Shihuishan; 6, Xinkaidi; 7, Chachanghoushan; 8, 44 Gongli; 9, Menglunshuiku; 10, Jiangbianzhan.
| 序号 No. | 样地名称 Plot name | 植被类型 Vegetation type | 北纬 North latitude | 东经 East longitude | 海拔 Elevation (m) | 飞行高度 Flying altitude (m) | 地面分辨率 Ground resolution (cm/pix) | 航测面积 Coverage area (km2) | 点云密度 Point cloud density (points/m2) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 补蚌 Bubeng | 季节雨林 Seasonal rainforest | 21.613° | 101.580° | 730 | 362 | 5.52 | 1.85 | 82 |
| 2 | 过门山 Guomenshan | 山地雨林 Montane rainforest | 22.246° | 100.599° | 1,120 | 300 | 4.47 | 1.87 | 31 |
| 3 | 茶地头 Chaditou | 常绿阔叶林 Evergreen broad-leaved forest | 22.250° | 100.612° | 1,284 | 310 | 4.18 | 0.58 | 143 |
| 4 | 大平掌 Dapingzhang | 常绿阔叶林 Evergreen broad- leaved forest | 22.230° | 100.574° | 1,750 | 193 | 2.46 | 0.25 | 103 |
| 5 | 石灰山 Shihuishan | 石灰山季雨林 Limestone monsoon forest | 21.911° | 101.283° | 606 | 258 | 3.36 | 0.90 | 56 |
| 6 | 新开地 Xinkaidi | 季节雨林次生林 Secondary forest of seasonal rainforest | 21.903° | 101.275° | 556 | 223 | 2.88 | 0.78 | 75 |
| 7 | 茶厂后山 Chachanghoushan | 季节雨林 Seasonal rainforest | 22.155° | 100.675° | 784 | 169 | 2.21 | 0.49 | 129 |
| 8 | 44公里 44 Gongli | 季节雨林 Seasonal rainforest | 21.971° | 101.148° | 806 | 287 | 3.58 | 1.07 | 49 |
| 9 | 勐仑水库 Menglunshuiku | 季节雨林 Seasonal rainforest | 21.935° | 101.179° | 656 | 361 | 4.56 | 0.72 | 30 |
| 10 | 江边站 Jiangbianzhan | 季节雨林 Seasonal rainforest | 22.219° | 100.734° | 640 | 407 | 5.24 | 1.03 | 23 |
表1 样地基本情况
Table 1 Basic information of sample plots
| 序号 No. | 样地名称 Plot name | 植被类型 Vegetation type | 北纬 North latitude | 东经 East longitude | 海拔 Elevation (m) | 飞行高度 Flying altitude (m) | 地面分辨率 Ground resolution (cm/pix) | 航测面积 Coverage area (km2) | 点云密度 Point cloud density (points/m2) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 补蚌 Bubeng | 季节雨林 Seasonal rainforest | 21.613° | 101.580° | 730 | 362 | 5.52 | 1.85 | 82 |
| 2 | 过门山 Guomenshan | 山地雨林 Montane rainforest | 22.246° | 100.599° | 1,120 | 300 | 4.47 | 1.87 | 31 |
| 3 | 茶地头 Chaditou | 常绿阔叶林 Evergreen broad-leaved forest | 22.250° | 100.612° | 1,284 | 310 | 4.18 | 0.58 | 143 |
| 4 | 大平掌 Dapingzhang | 常绿阔叶林 Evergreen broad- leaved forest | 22.230° | 100.574° | 1,750 | 193 | 2.46 | 0.25 | 103 |
| 5 | 石灰山 Shihuishan | 石灰山季雨林 Limestone monsoon forest | 21.911° | 101.283° | 606 | 258 | 3.36 | 0.90 | 56 |
| 6 | 新开地 Xinkaidi | 季节雨林次生林 Secondary forest of seasonal rainforest | 21.903° | 101.275° | 556 | 223 | 2.88 | 0.78 | 75 |
| 7 | 茶厂后山 Chachanghoushan | 季节雨林 Seasonal rainforest | 22.155° | 100.675° | 784 | 169 | 2.21 | 0.49 | 129 |
| 8 | 44公里 44 Gongli | 季节雨林 Seasonal rainforest | 21.971° | 101.148° | 806 | 287 | 3.58 | 1.07 | 49 |
| 9 | 勐仑水库 Menglunshuiku | 季节雨林 Seasonal rainforest | 21.935° | 101.179° | 656 | 361 | 4.56 | 0.72 | 30 |
| 10 | 江边站 Jiangbianzhan | 季节雨林 Seasonal rainforest | 22.219° | 100.734° | 640 | 407 | 5.24 | 1.03 | 23 |

图2 森林中地面控制点坐标测量(左)与标识布设(右)示例
Fig. 2 Ground control point coordinate measurement (left) and mark (right) in forest

图3 航拍影像中的地面控制点标识示例
Fig. 3 Mark of ground control point in aerial photograph
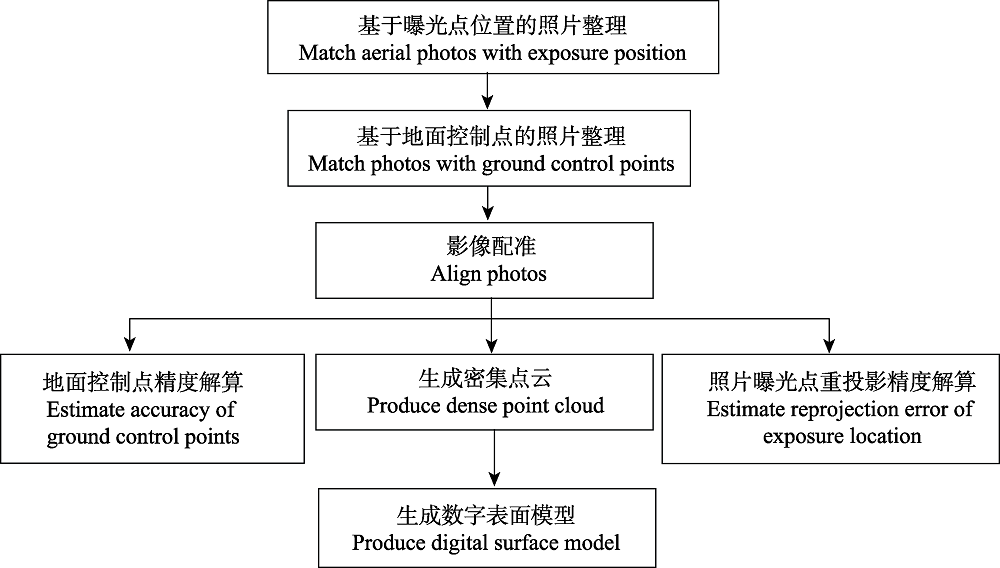
图4 基于Photoscan软件的航片数据处理流程
Fig. 4 Aerial photograph processing flow with Photoscan software
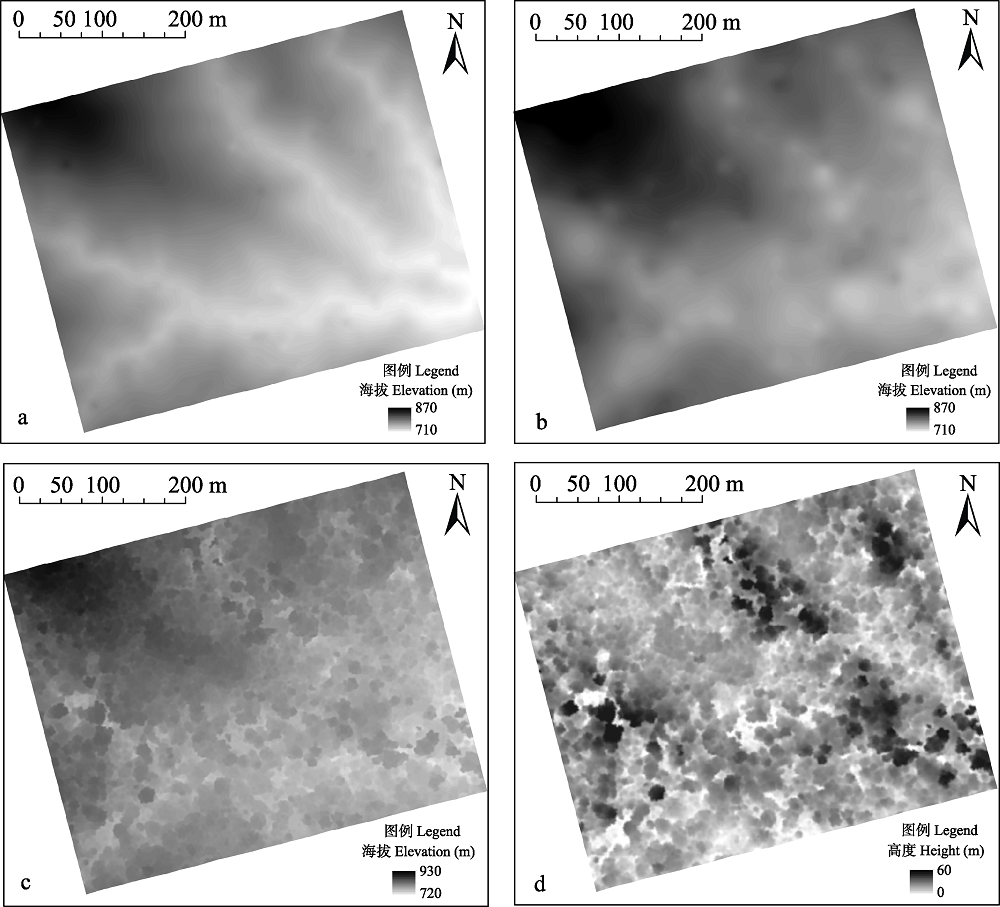
图5 实测数字地形模型(a)、估测数字地形模型(b)、数字表面模型(c)和林冠高度模型(d)示意图
Fig. 5 Example of measured digital terrain model (a), estimated digital terrain model (b), digital surface model (c) and canopy height model (d)
| 样地名称 Plot name | 地面控制点RMSE RMSE of ground control point | 样地顶点RMSE RMSE of corner stake | ||||||
|---|---|---|---|---|---|---|---|---|
| 数量 Number | 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | 数量 Number | 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | |
| 补蚌 Bubeng | 10 | 0.581 | 0.454 | 0.476 | 4 | 0.891 | 0.659 | 0.846 |
| 过门山 Guomenshan | 6 | 0.247 | 0.057 | 0.076 | 4 | 0.833 | 0.634 | 0.648 |
| 茶地头 Chaditou | 8 | 0.404 | 0.324 | 0.368 | 4 | 0.125 | 0.007 | 0.012 |
| 大平掌 Dapingzhang | 10 | 0.333 | 0.202 | 0.260 | 4 | 0.633 | 0.336 | 0.532 |
| 石灰山 Shihuishan | 7 | 0.086 | 0.005 | 0.007 | 4 | 0.671 | 0.311 | 0.560 |
| 新开地 Xinkaidi | 7 | 0.205 | 0.090 | 0.091 | 4 | 0.284 | 0.022 | 0.100 |
| 茶厂后山 Chachanghoushan | 7 | 0.104 | 0.006 | 0.009 | 4 | 0.293 | 0.020 | 0.104 |
| 44公里 44 Gongli | 5 | 0.131 | 0.007 | 0.013 | 4 | 1.430 | 1.101 | 1.700 |
| 勐仑水库 Menglunshuiku | 5 | 0.487 | 0.292 | 0.406 | 4 | 1.082 | 0.691 | 0.994 |
| 江边站 Jiangbianzhan | 7 | 0.397 | 0.228 | 0.310 | 4 | 0.325 | 0.139 | 0.161 |
| 最大 Maximum | 10 | 0.581 | 0.454 | 0.476 | 4 | 1.430 | 1.101 | 1.700 |
| 最小 Minimum | 5 | 0.086 | 0.005 | 0.007 | 4 | 0.125 | 0.007 | 0.012 |
| 平均值 ± 标准差 Mean ± SD | 7 ± 2 | 0.297 ± 0.170 | 0.167 ± 0.158 | 0.202 ± 0.182 | 4 ± 0 | 0.657 ± 0.412 | 0.392 ± 0.368 | 0.566 ± 0.523 |
表2 样地控制点与样地顶点均方根误差
Table 2 RMSE of ground control point and corner stake in sample plots
| 样地名称 Plot name | 地面控制点RMSE RMSE of ground control point | 样地顶点RMSE RMSE of corner stake | ||||||
|---|---|---|---|---|---|---|---|---|
| 数量 Number | 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | 数量 Number | 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | |
| 补蚌 Bubeng | 10 | 0.581 | 0.454 | 0.476 | 4 | 0.891 | 0.659 | 0.846 |
| 过门山 Guomenshan | 6 | 0.247 | 0.057 | 0.076 | 4 | 0.833 | 0.634 | 0.648 |
| 茶地头 Chaditou | 8 | 0.404 | 0.324 | 0.368 | 4 | 0.125 | 0.007 | 0.012 |
| 大平掌 Dapingzhang | 10 | 0.333 | 0.202 | 0.260 | 4 | 0.633 | 0.336 | 0.532 |
| 石灰山 Shihuishan | 7 | 0.086 | 0.005 | 0.007 | 4 | 0.671 | 0.311 | 0.560 |
| 新开地 Xinkaidi | 7 | 0.205 | 0.090 | 0.091 | 4 | 0.284 | 0.022 | 0.100 |
| 茶厂后山 Chachanghoushan | 7 | 0.104 | 0.006 | 0.009 | 4 | 0.293 | 0.020 | 0.104 |
| 44公里 44 Gongli | 5 | 0.131 | 0.007 | 0.013 | 4 | 1.430 | 1.101 | 1.700 |
| 勐仑水库 Menglunshuiku | 5 | 0.487 | 0.292 | 0.406 | 4 | 1.082 | 0.691 | 0.994 |
| 江边站 Jiangbianzhan | 7 | 0.397 | 0.228 | 0.310 | 4 | 0.325 | 0.139 | 0.161 |
| 最大 Maximum | 10 | 0.581 | 0.454 | 0.476 | 4 | 1.430 | 1.101 | 1.700 |
| 最小 Minimum | 5 | 0.086 | 0.005 | 0.007 | 4 | 0.125 | 0.007 | 0.012 |
| 平均值 ± 标准差 Mean ± SD | 7 ± 2 | 0.297 ± 0.170 | 0.167 ± 0.158 | 0.202 ± 0.182 | 4 ± 0 | 0.657 ± 0.412 | 0.392 ± 0.368 | 0.566 ± 0.523 |
| y | 模型垂直均方根 误差 Vertical RMSE in estimated model | 模型水平均方根 误差 Horizontal RMSE in estimated model | 模型整体均方根 误差 Total RMSE in estimated model |
|---|---|---|---|
| 截距 Intercept | -3.336E-16 | 4.430E-17 | -1.540E-16 |
| x1 | -0.309* | 0.082 | -0.176 |
| x2 | -0.005 | 0.003* | |
| x3 | 4.964* | 3.157** | |
| VIF_x1 | 2.022 | 1.026 | 1.237 |
| VIF_x2 | 3.285 | 1.026 | |
| VIF_x3 | 3.775 | 1.237 | |
| R2 | 0.757 | 0.493 | 0.650 |
| F-统计量 F-statistic | 6.245 | 3.405 | 6.504 |
| P | 0.028 | 0.093 | 0.025 |
表3 控制点数量(x1)、飞行高度(x2)和对应方向上的RTK均方根误差(x3)对点云解算模型中均方根误差的逐步回归结果
Table 3 Stepwise regression analysis result of ground control point amount (x1), flying height (x2), and root mean square error of RTK in related direction (x3) to root mean square error (RMSE) in estimated model (point cloud based)
| y | 模型垂直均方根 误差 Vertical RMSE in estimated model | 模型水平均方根 误差 Horizontal RMSE in estimated model | 模型整体均方根 误差 Total RMSE in estimated model |
|---|---|---|---|
| 截距 Intercept | -3.336E-16 | 4.430E-17 | -1.540E-16 |
| x1 | -0.309* | 0.082 | -0.176 |
| x2 | -0.005 | 0.003* | |
| x3 | 4.964* | 3.157** | |
| VIF_x1 | 2.022 | 1.026 | 1.237 |
| VIF_x2 | 3.285 | 1.026 | |
| VIF_x3 | 3.775 | 1.237 | |
| R2 | 0.757 | 0.493 | 0.650 |
| F-统计量 F-statistic | 6.245 | 3.405 | 6.504 |
| P | 0.028 | 0.093 | 0.025 |
| 样地名称 Plot name | 照片数量 Number of photos | RMSE | ||
|---|---|---|---|---|
| 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | ||
| 补蚌 Bubeng | 1,142 | 28.924 | 19.230 | 34.733 |
| 过门山 Guomenshan | 1,632 | 21.951 | 12.690 | 25.356 |
| 茶地头 Chaditou | 625 | 32.228 | 22.554 | 39.336 |
| 大平掌 Dapingzhang | 858 | 36.709 | 13.466 | 39.101 |
| 石灰山 Shihuishan | 1,536 | 39.100 | 23.704 | 45.724 |
| 新开地 Xinkaidi | 1,293 | 37.688 | 25.509 | 45.510 |
| 茶厂后山 Chachanghoushan | 2,088 | 47.508 | 18.102 | 50.839 |
| 44公里 44 Gongli | 2,013 | 34.682 | 12.663 | 36.922 |
| 勐仑水库 Menglunshuiku | 675 | 32.660 | 12.659 | 35.028 |
| 江边站 Jiangbianzhan | 1,132 | 28.973 | 23.759 | 37.469 |
| 最大 Maximum | 2,088 | 47.508 | 25.509 | 50.839 |
| 最小 Minimum | 625 | 21.951 | 12.659 | 25.356 |
| 平均值 ± 标准差 Mean ± SD | 1,299 ± 515 | 34.042 ± 6.920 | 18.434 ± 5.252 | 39.002 ± 7.108 |
表4 各样地相机曝光点重投影误差
Table 4 Reprojection error of camera exposure position in sample plots
| 样地名称 Plot name | 照片数量 Number of photos | RMSE | ||
|---|---|---|---|---|
| 垂直 Vertical (m) | 水平 Horizontal (m) | 全局 Total (m) | ||
| 补蚌 Bubeng | 1,142 | 28.924 | 19.230 | 34.733 |
| 过门山 Guomenshan | 1,632 | 21.951 | 12.690 | 25.356 |
| 茶地头 Chaditou | 625 | 32.228 | 22.554 | 39.336 |
| 大平掌 Dapingzhang | 858 | 36.709 | 13.466 | 39.101 |
| 石灰山 Shihuishan | 1,536 | 39.100 | 23.704 | 45.724 |
| 新开地 Xinkaidi | 1,293 | 37.688 | 25.509 | 45.510 |
| 茶厂后山 Chachanghoushan | 2,088 | 47.508 | 18.102 | 50.839 |
| 44公里 44 Gongli | 2,013 | 34.682 | 12.663 | 36.922 |
| 勐仑水库 Menglunshuiku | 675 | 32.660 | 12.659 | 35.028 |
| 江边站 Jiangbianzhan | 1,132 | 28.973 | 23.759 | 37.469 |
| 最大 Maximum | 2,088 | 47.508 | 25.509 | 50.839 |
| 最小 Minimum | 625 | 21.951 | 12.659 | 25.356 |
| 平均值 ± 标准差 Mean ± SD | 1,299 ± 515 | 34.042 ± 6.920 | 18.434 ± 5.252 | 39.002 ± 7.108 |
| 样地名称 Plot name | 面积 Area (ha) | 林冠覆盖度 Canopy cover | 林冠最大高度 Maximum height of canopy (m) | 林冠平均高度 Average height of canopy (m) | 估测地形与实测地形高差均值 Mean difference between DTMestimated and DTMmeasured | 估测地形与实测地形高差标准差 Standard deviation between DTMestimated and DTMmeasured | 估测地形模型(y)与实测地形模型(x)的检验方程参数对比 Linear equation test result of DTMestimated (y) and DTMmeasured (x) | ||
|---|---|---|---|---|---|---|---|---|---|
| k | b | R2 | |||||||
| 补蚌 Bubeng | 20 | 0.90 | 54.67 | 22.43 | 10.06 | 6.09 | 0.995 | 14.187 | 0.981 |
| 过门山 Guomenshan | 20 | 0.97 | 52.10 | 22.90 | 2.10 | 6.70 | 1.005 | -2.782 | 0.992 |
| 茶地头 Chaditou | 1 | 0.95 | 35.63 | 16.79 | 4.55 | 5.90 | 0.979 | 30.783 | 0.761 |
| 大平掌 Dapingzhang | 1 | 0.93 | 37.66 | 18.37 | -2.91 | 5.28 | 0.888 | 188.821 | 0.920 |
| 石灰山 Shihuishan | 1 | 0.75 | 22.82 | 8.22 | 0.50 | 2.27 | 0.982 | 11.895 | 0.978 |
| 新开地 Xinkaidi | 1 | 0.90 | 20.37 | 11.68 | 2.79 | 3.94 | 1.199 | -108.789 | 0.788 |
| 茶厂后山 Chachanghoushan | 1 | 0.98 | 48.98 | 24.44 | 7.62 | 6.37 | 0.839 | 125.731 | 0.834 |
| 44公里 44 Gongli | 1 | 0.99 | 44.80 | 25.36 | -3.60 | 8.58 | 1.237 | -196.197 | 0.761 |
| 仑水库 Menglunshuiku | 1 | 0.89 | 45.79 | 23.82 | -26.48 | 7.42 | 0.973 | -7.650 | 0.779 |
| 江边站 Jiangbianzhan | 1 | 0.93 | 52.46 | 26.43 | 0.18 | 17.12 | 1.245 | -159.057 | 0.638 |
表5 线性方程检验结果与样地结构特征
Table 5 Linear equation test result and structure characteristics of sample plots
| 样地名称 Plot name | 面积 Area (ha) | 林冠覆盖度 Canopy cover | 林冠最大高度 Maximum height of canopy (m) | 林冠平均高度 Average height of canopy (m) | 估测地形与实测地形高差均值 Mean difference between DTMestimated and DTMmeasured | 估测地形与实测地形高差标准差 Standard deviation between DTMestimated and DTMmeasured | 估测地形模型(y)与实测地形模型(x)的检验方程参数对比 Linear equation test result of DTMestimated (y) and DTMmeasured (x) | ||
|---|---|---|---|---|---|---|---|---|---|
| k | b | R2 | |||||||
| 补蚌 Bubeng | 20 | 0.90 | 54.67 | 22.43 | 10.06 | 6.09 | 0.995 | 14.187 | 0.981 |
| 过门山 Guomenshan | 20 | 0.97 | 52.10 | 22.90 | 2.10 | 6.70 | 1.005 | -2.782 | 0.992 |
| 茶地头 Chaditou | 1 | 0.95 | 35.63 | 16.79 | 4.55 | 5.90 | 0.979 | 30.783 | 0.761 |
| 大平掌 Dapingzhang | 1 | 0.93 | 37.66 | 18.37 | -2.91 | 5.28 | 0.888 | 188.821 | 0.920 |
| 石灰山 Shihuishan | 1 | 0.75 | 22.82 | 8.22 | 0.50 | 2.27 | 0.982 | 11.895 | 0.978 |
| 新开地 Xinkaidi | 1 | 0.90 | 20.37 | 11.68 | 2.79 | 3.94 | 1.199 | -108.789 | 0.788 |
| 茶厂后山 Chachanghoushan | 1 | 0.98 | 48.98 | 24.44 | 7.62 | 6.37 | 0.839 | 125.731 | 0.834 |
| 44公里 44 Gongli | 1 | 0.99 | 44.80 | 25.36 | -3.60 | 8.58 | 1.237 | -196.197 | 0.761 |
| 仑水库 Menglunshuiku | 1 | 0.89 | 45.79 | 23.82 | -26.48 | 7.42 | 0.973 | -7.650 | 0.779 |
| 江边站 Jiangbianzhan | 1 | 0.93 | 52.46 | 26.43 | 0.18 | 17.12 | 1.245 | -159.057 | 0.638 |
| [1] | Agisoft (2018) Agisoft PhotoScan User Manual. |
| [2] | Brokaw NVL (1985) Gap-phase regeneration in a tropical forest. Ecology, 66, 682-687. |
| [3] | Brown DC (1971) Close-range camera calibration. Photogrammetric Engineering, 37, 855-866. |
| [4] | Chen JY, Dang YM (2005) Recent progress in global navigation of satellite system. Science of Surveying and Mapping, 30(2), 9-12. (in Chinese with English abstract) |
| [陈俊勇, 党亚民 (2005) 全球导航卫星系统的新进展. 测绘科学, 30(2), 9-12.] | |
| [5] | Christie KS, Gilbert SL, Brown CL, Hatfield M, Hanson L (2016) Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Frontiers in Ecology and the Environment, 14, 242-252. |
| [6] | Cunliffe AM, Brazier RE, Anderson K (2016) Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sensing of Environment, 183, 129-143. |
| [7] | Dai WJ, Ding XL, Zhu JJ (2008) Study on multipath effect in structure health monitoring using GPS. Journal of Geodesy and Geodynamics, 28, 65-70. (in Chinese with English abstract) |
| [戴吾蛟, 丁晓利, 朱建军 (2008) GPS动态变形测量中的多路径效应特征研究. 大地测量与地球动力学, 28, 65-70.] | |
| [8] | Deng GQ, Duan YH, Xiao XN, Wang ZH, Zhou Y, Jiang HB, Zhu J (2011) On the revision of Aerophotogrammetry— Control Survey Specifications. Standardization of Surveying and Mapping, 27(2), 3-9. (in Chinese with English abstract) |
| [邓国庆, 段怡红, 肖学年, 王占宏, 周一, 蒋红兵, 朱健 (2011) 《数字航空摄影测量控制测量规范》编写说明. 测绘标准化, 27(2), 3-9.] | |
| [9] | Duffy JP, Cunliffe AM, DeBell L, Sandbrook C, Wich SA, Shutler JD, Myers-Smith IH, Varela MR, Anderson K (2017) Location, location, location: Considerations when using lightweight drones in challenging environments. Remote Sensing in Ecology and Conservation, 4, 7-19. |
| [10] | Fan XY, Zhou Q (2010) Review of multipath effects in GPS measurement. Chinese Journal of Engineering Geophysics, 7, 382-386. (in Chinese with English abstract) |
| [范晓燕, 周乾 (2010) 测量中多路径效应研究综述. 工程地球物理学报, 7, 382-386.] | |
| [11] | Fan XQ (2017) Application of UAV image free control technique in topographic map surveying. Bulletin of Surveying and Mapping, (Suppl.1), 66-68. (in Chinese with English abstract) |
| [范秀庆 (2017) 无人机免像控技术在地形图测量中的应用研究. 测绘通报, (增刊 1), 66-68.] | |
| [12] | Feng MP, Zhao YP, Yang ZY, Zhang QG (2017) Research and application of key techniques for high precision mapping of 1:500 aerial photogrammetry. Surveying and Mapping, 40(4), 178-192. (in Chinese with English abstract) |
| [冯茂平, 赵元沛, 杨正银, 张秦罡 (2017) 1:500 航测法高精度成图的关键技术研究及其应用. 测绘, 40(4), 178-192.] | |
| [13] | Gross JW, Heumann BW (2016) A statistical examination of image stitching software packages for use with unmanned aerial systems. Photogrammetric Engineering and Remote Sensing, 82, 419-425. |
| [14] | Harwin S, Lucieer A (2012) Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sensing, 4, 1573-1599. |
| [15] | Harwin S, Lucieer A, Osborn J (2015) The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sensing, 7, 11933-11953. |
| [16] | Huang YQ, Wen J, Xie ZH (2015) Research on non-metric calibration algorithm of camera lens distortion. Modern Electronics Technique, 38(20), 59-66. (in Chinese with English abstract) |
| [黄应清, 文军, 谢志宏 (2015) 摄像机畸变的非量测校正方法研究. 现代电子技术, 38(20), 59-66.] | |
| [17] | Hubbell SP, Foster RB, O’Brien ST, Harms KE, Condit R, Wechsler B, Wright SJ, de Lao SL (1999) Light-gap disturbances, recruitment limitation, and tree diversity in a neotropical forest. Science, 283, 554-557. |
| [18] | Husson E, Ecke F, Reese H (2016) Comparison of manual mapping and automated object-based image analysis of non-submerged aquatic vegetation from very-high- resolution UAS Images. Remote Sensing, 8, 724. |
| [19] | James MR, Robson S (2012) Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. Journal of Geophysical Research, 117, F03017. |
| [20] | Jaud M, Passot S, Le Bivic R, Delacourt C, Grandjean P, Le Dantec N (2016) Assessing the accuracy of high resolution digital surface models computed by PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sensing, 8, 465. |
| [21] | Jensen JLR, Mathews AJ (2016) Assessment of image-based point cloud products to generate a bare earth surface and estimate canopy heights in a woodland ecosystem. Remote Sensing, 8, 50. |
| [22] | Jin XL, Liu SY, Baret F, Hemerle M, Comar A (2017) Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sensing of Environment, 198, 105-114. |
| [23] | Katz D, Friess M (2014) Technical note: 3D from standard digital photography of human crania—A preliminary assessment. American Journal of Physical Anthropology, 154, 152-158. |
| [24] | Koh LP, Wich SA (2012) Dawn of drone ecology: Low-cost autonomous aerial vehicles for conservation. Tropical Conservation Science, 5, 121-132. |
| [25] | Li Y, Xu W, Wu W (2011) Application research on aviation remote sensing UAV for disaster monitoring. Journal of Catastrophology, 26(1), 138-143. (in Chinese with English abstract) |
| [李云, 徐伟, 吴玮 (2011) 灾害监测无人机技术应用与研究. 灾害学, 26(1), 138-143.] | |
| [26] | Lisein J, Pierrot-Deseilligny M, Bonnet S, Lejeune P (2013) A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests, 4, 922-944. |
| [27] | Ma RS, Ma SQ, Wang LP, Zhang XP, Pan Y, Guan FS (2008) Preliminary experiment of forest fire monitoring system on unmanned aerial vehicle. Meteorological Science and Technology, 36, 100-104. (in Chinese with English abstract) |
| [马瑞升, 马舒庆, 王利平, 张小平, 潘毅, 官福顺 (2008) 微型无人驾驶飞机火情监测系统及其初步试验. 气象科技, 36, 100-104.] | |
| [28] | Pickett STA, White PS (1985) The Ecology of Natural Disturbance and Patch Dynamics. Academic Press, New York. |
| [29] | Ryan JC, Hubbard AL, Box JE, Todd J, Christoffersen P, Carr JR, Holt TO, Snooke N (2015) UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere, 9, 1-11. |
| [30] | Tahar KN (2013) An evaluation of different number of ground control points in unmanned aerial vehicle photogrammetric block. In: International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (eds ISPRS 8th 3DGeoInfo Conference & WG II/2 Workshop), pp. 93-98. ISPRS, Istanbul. |
| [31] | Tian C, Chen J, Li NN, Guo YH (2017) An rapid method to build high accuracy DSM with UAV image free control technique. Bulletin of Surveying and Mapping, (8), 158-160. (in Chinese with English abstract) |
| [田超, 陈杰, 李能能, 郭耀煌 (2017) 利用无人机免像控快速构建高精度DSM. 测绘通报, (8), 158-160.] | |
| [32] | Tomastik J, Mokros M, Salon S, Chudy F, Tunak D (2017) Accuracy of photogrammetric UAV-based point clouds under conditions of partially-open forest canopy. Forests, 8, 151. |
| [33] | Trajkovski KK, Sterle O, Stopar B (2010) Sturdy positioning with high sensitivity GPS sensors under adverse conditions. Sensors, 10, 8332-8347. |
| [34] | Turner D, Lucieer A, Wallace L (2014) Direct georeferencing of ultrahigh-resolution UAV Imagery. IEEE Transactions on Geoscience and Remote Sensing, 52, 2738-2745. |
| [35] | Ucar Z, Bettinger P, Weaver S, Merry KL, Faw K (2014) Dynamic accuracy of recreation-grade GPS receivers in oak-hickory forests. Forestry, 87, 504-511. |
| [36] | Westoby MJ, Brasington J, Glasser NF, Hambrey MJ, Reynolds JM (2012) ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300-314. |
| [37] | Zhang J, Hu JB, Lian JY, Fan ZJ, Ouyang XJ, Ye WH (2016) Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biological Conservation, 198, 60-69. |
| [38] | Zhang JQ, Pan L, Wang SG (2003) Phototopography. Wuhan University Press, Wuhan. (in Chinese) |
| [张剑清, 潘励, 王树根 (2003) 摄影测量学. 武汉大学出版社, 武汉.] | |
| [39] | Zhang Y, Tao P, Liang SX, Liang WL (2011) Research on application of UAV RS techniques in forest inventories. Journal of Southwest Forestry University, 31(3), 49-53. (in Chinese with English abstract) |
| [张园, 陶萍, 梁世祥, 梁万里 (2011) 无人机遥感在森林资源调查中的应用. 西南林业大学学报, 31(3), 49-53.] | |
| [40] | Zhao L, Ding JC, Ma XF (2011)Principle and Application of Satellite Navigation. Northwestern Polytechnical University Press, Xi’an. (in Chinese) |
| [赵琳, 丁继成, 马雪飞 (2011) 卫星导航原理及应用. 西北工业大学出版社, 西安.] | |
| [41] | [中国民航局 (2018) 关于征求《无人驾驶航空器飞行管理暂行条例(征求意见稿)》意见的通知.] |
| [42] | Zhu H, Li YH, Xu ZF, Wang H, Li BG (2001) Characteristics and affinity of the flora of Xishuangbanna, SW China. Guihaia, 21, 127-136. (in Chinese with English abstract) |
| [朱华, 李延辉, 许再富, 王洪, 李宝贵 (2001) 西双版纳植物区系的特点与亲缘. 广西植物, 21, 127-136.] |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
备案号:京ICP备16067583号-7
Copyright © 2026 版权所有 《生物多样性》编辑部
地址: 北京香山南辛村20号, 邮编:100093
电话: 010-62836137, 62836665 E-mail: biodiversity@ibcas.ac.cn
![]()