|
|
|
|
-
 2009年7月10日, 彼得·雷文再次访问中国科学院植物研究所, 围绕EOL中国项目的组织架构、数据整合、技术对接等议题进行了深入探讨。
2009年7月10日, 彼得·雷文再次访问中国科学院植物研究所, 围绕EOL中国项目的组织架构、数据整合、技术对接等议题进行了深入探讨。
-
 2008年11月14日, 彼得·雷文访问中国科学院植物研究所, 为科研人员和研究生介绍EOL国际合作计划。
2008年11月14日, 彼得·雷文访问中国科学院植物研究所, 为科研人员和研究生介绍EOL国际合作计划。
-
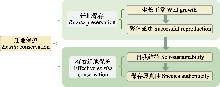
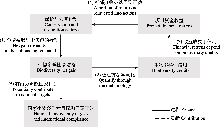 生物多样性信用项目从行动到收益回馈的逻辑框架
生物多样性信用项目从行动到收益回馈的逻辑框架
-
 生物多样性信用市场发展障碍与相应建议
生物多样性信用市场发展障碍与相应建议
-
不同生物多样性信用机制下单个信用的价格
-
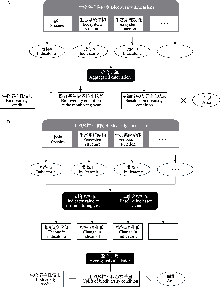 两种常用的生物多样性信用核算方法框架。A: 先聚合再计算变化; B: 先计算变化值再进行聚合计算。
两种常用的生物多样性信用核算方法框架。A: 先聚合再计算变化; B: 先计算变化值再进行聚合计算。
-
 荒漠灌木叶际细菌群落的构建过程。(a)内生、附生细菌群落的β最近分类单元指数(βNTI)值, 虚线为阈值|2| (>|2|表示偏确定性过程,<|2|表示偏随机性过程); (b)基于零模型分析的确定性过程(同质选择和异质选择)与随机性过程(均质化扩散、扩散限制和生态漂变)对细菌群落构建的相对影响。缩写含义见图1。
荒漠灌木叶际细菌群落的构建过程。(a)内生、附生细菌群落的β最近分类单元指数(βNTI)值, 虚线为阈值|2| (>|2|表示偏确定性过程,<|2|表示偏随机性过程); (b)基于零模型分析的确定性过程(同质选择和异质选择)与随机性过程(均质化扩散、扩散限制和生态漂变)对细菌群落构建的相对影响。缩写含义见图1。
-
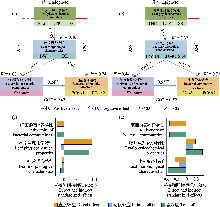 荒漠灌木叶际细菌群落结构变异的主要影响因素。(a)叶际内生细菌群落结构方程模型; (b)叶际附生细菌群落结构方程模型; 箭头旁数值为标准化路径系数, 实线表示显著效应(P<0.05), 虚线表示不显著效应(P>0.05), 红色和蓝色分别表示正效应和负效应, R2为变量解释度, GOF为模型拟合优度。(c)各变量对叶际内生细菌群落结构的标准化效应分解; (d)各变量对叶际附生细菌群落结构的标准化效应分解。*P<0.05; **P<0.01; ***P<0.001。叶片功能性状对应缩写见图3。
荒漠灌木叶际细菌群落结构变异的主要影响因素。(a)叶际内生细菌群落结构方程模型; (b)叶际附生细菌群落结构方程模型; 箭头旁数值为标准化路径系数, 实线表示显著效应(P<0.05), 虚线表示不显著效应(P>0.05), 红色和蓝色分别表示正效应和负效应, R2为变量解释度, GOF为模型拟合优度。(c)各变量对叶际内生细菌群落结构的标准化效应分解; (d)各变量对叶际附生细菌群落结构的标准化效应分解。*P<0.05; **P<0.01; ***P<0.001。叶片功能性状对应缩写见图3。
-
 叶片功能性状对荒漠灌木叶际细菌群落结构的影响。(a)冗余分析显示叶际细菌群落与叶片功能性状的关系; (b)变差分解显示叶片功能性状中叶片养分、叶片生理、叶片形态对叶际细菌群落结构变异的解释比例。小于0的值未显示。BW: 叶片宽度; BL: 叶片长度; SLA: 比叶面积; LMA: 比叶重; LDMC: 叶干物质含量; SS: 可溶性糖; ST: 淀粉; Phe: 总酚; Fla: 总黄酮; TNC: 总非结构性碳水化合物; LTP: 叶片总磷; LTC: 叶片总碳。
叶片功能性状对荒漠灌木叶际细菌群落结构的影响。(a)冗余分析显示叶际细菌群落与叶片功能性状的关系; (b)变差分解显示叶片功能性状中叶片养分、叶片生理、叶片形态对叶际细菌群落结构变异的解释比例。小于0的值未显示。BW: 叶片宽度; BL: 叶片长度; SLA: 比叶面积; LMA: 比叶重; LDMC: 叶干物质含量; SS: 可溶性糖; ST: 淀粉; Phe: 总酚; Fla: 总黄酮; TNC: 总非结构性碳水化合物; LTP: 叶片总磷; LTC: 叶片总碳。
-
 基于Bray-Curtis距离的不同荒漠灌木叶际细菌群落结构主坐标分析(PCoA)。(a)叶片微生境对叶际细菌群落结构的影响; 植物物种身份对叶际内生(b)和附生(c)细菌群落结构的影响; 植物属身份对叶际内生(d)和附生(e)细菌群落结构的影响。图中虚线椭圆表示基于95%置信区间的组内数据分布范围。
基于Bray-Curtis距离的不同荒漠灌木叶际细菌群落结构主坐标分析(PCoA)。(a)叶片微生境对叶际细菌群落结构的影响; 植物物种身份对叶际内生(b)和附生(c)细菌群落结构的影响; 植物属身份对叶际内生(d)和附生(e)细菌群落结构的影响。图中虚线椭圆表示基于95%置信区间的组内数据分布范围。
-
 荒漠灌木叶际内生与附生细菌群落α多样性分布特征。Cc: 头状沙拐枣; Cj: 泡果沙拐枣; Ha: 梭梭; Hp: 白梭梭; Th: 刚毛柽柳; Tr: 多枝柽柳。*P<0.05; **P<0.01; ***P<0.001。箱线右方小写字母表示经最小显著差数法(LSD)多重比较检验结果, 不同字母表示差异显著。
荒漠灌木叶际内生与附生细菌群落α多样性分布特征。Cc: 头状沙拐枣; Cj: 泡果沙拐枣; Ha: 梭梭; Hp: 白梭梭; Th: 刚毛柽柳; Tr: 多枝柽柳。*P<0.05; **P<0.01; ***P<0.001。箱线右方小写字母表示经最小显著差数法(LSD)多重比较检验结果, 不同字母表示差异显著。
-
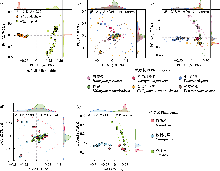
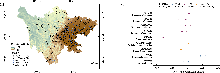 四川省繁殖鸟类中非迁徙繁殖鸟类群落系统发育多样性(系统发育多样性标准化效应量, SES.PD)的空间分布格局(a)和不同生态因子对系统发育多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类中非迁徙繁殖鸟类群落系统发育多样性(系统发育多样性标准化效应量, SES.PD)的空间分布格局(a)和不同生态因子对系统发育多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
 四川省繁殖鸟类中非迁徙繁殖鸟类群落功能多样性(功能多样性标准化效应量, SES.FD)的空间分布格局(a)和不同生态因子对功能多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类中非迁徙繁殖鸟类群落功能多样性(功能多样性标准化效应量, SES.FD)的空间分布格局(a)和不同生态因子对功能多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
 四川省繁殖鸟类中非迁徙繁殖鸟类群落分类多样性(物种丰富度)的空间分布格局(a)和不同生态因子对分类多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类中非迁徙繁殖鸟类群落分类多样性(物种丰富度)的空间分布格局(a)和不同生态因子对分类多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
 四川省繁殖鸟类群落系统发育多样性(系统发育多样性标准化效应量, SES.PD)的空间分布格局(a)和不同生态因子对系统发育多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类群落系统发育多样性(系统发育多样性标准化效应量, SES.PD)的空间分布格局(a)和不同生态因子对系统发育多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
 四川省繁殖鸟类群落功能多样性(功能多样性标准化效应量, SES.FD)的空间分布格局(a)和不同生态因子对功能多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类群落功能多样性(功能多样性标准化效应量, SES.FD)的空间分布格局(a)和不同生态因子对功能多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
 四川省繁殖鸟类群落分类多样性(物种丰富度)的空间分布格局(a)和不同生态因子对分类多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
四川省繁殖鸟类群落分类多样性(物种丰富度)的空间分布格局(a)和不同生态因子对分类多样性影响的广义线性回归模型结果(b), 其中展示了模型平均后的标准化系数估计值及其95%置信区间。
-
四川省繁殖鸟类各目物种数
-
 迁地保护类型及其成功的评判依据
迁地保护类型及其成功的评判依据
-
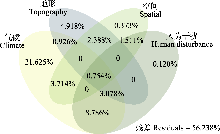 基于变差分解的群落特异性(以LCBD衡量)影响因子贡献分析。解释比例极小的部分在图中以0显示。
基于变差分解的群落特异性(以LCBD衡量)影响因子贡献分析。解释比例极小的部分在图中以0显示。
|
|

