基于红外相机的不可个体识别动物种群密度估算方法
A practical guide for estimating the density of unmarked populations using camera traps
基于红外相机的不可个体识别动物种群密度估算方法 |
| 李珍珍, 杜梦甜, 朱原辛, 王大伟, 李治霖, 王天明 |
|
A practical guide for estimating the density of unmarked populations using camera traps |
| Zhenzhen Li, Mengtian Du, Yuanxin Zhu, Dawei Wang, Zhilin Li, Tianming Wang |
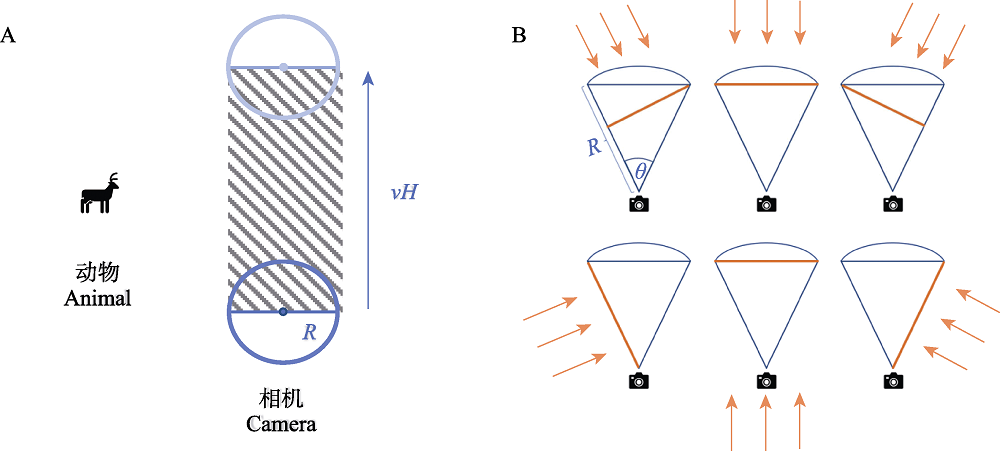
| 图2 相机以类似动物速度运动所覆盖面积(A)和动物从6个典型角度接近相机探测区域的剖面图(B) (修改自Rowcliffe et al, |
| Fig. 2 Coverage area of a camera moving at a speed similar to that of an animal (A) and the profile of an animal approaching the probe area from six typical angles (B) (Modified from Rowcliffe et al, |
|
|